
There are a wide variety of terrains and obstacles that can be used to populate the various areas of the arena. The common aspects of the terrains and obstacles are that they fit in a 1200 x 600 mm area of the pallet. This will either span two pallets or will be on a ramp.

The possible terrains are laid out as follows.
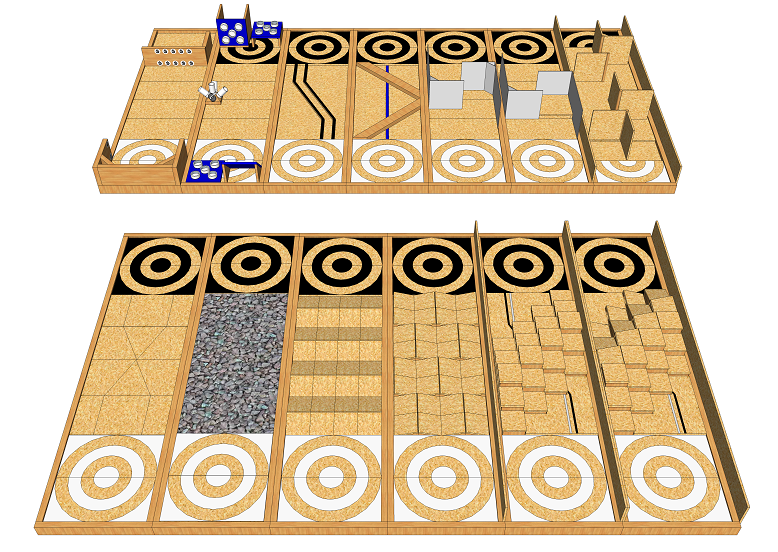
The terrains are in the lower row and are, from left to right:
- Line following (flat floor)
- Gravel (loose)
- Continuous Ramps
- Crossing Ramps
- Stepfields
- Angled Stepfields
Additional obstacles and tasks on the upper row, from left to right, are:
- Visual Acuity (task)
- Dexterous Inspection (task)
- Balance Beam (obstacle)
- Angled Beams (obstacle)
- Variable Slalom (obstacle)
- Variable Slalom with Hurdle (obstacle)
- Double Slalom
The obstacles, tasks and terrains can be constructed in any manner that results in the requisite form. The following characteristics may help inform their construction.
- Where possible, flat surfaces that robots drive on should be OSB (or plywood with an OSB-like surface).
- All slopes are 15 degrees.
- All units are either 1/2 the width of the pallet minus a sawblade width (295 mm) or 1/4 the width of the pallet minus a sawblade width (145 mm). The sawblade width allows a thin wall panel to be placed between terrain elements to make a maze or slalom.
- All increments in height are 50 mm (2 in).
For example, the angled stepfields each take up a footprint of 145 x 145 mm, with the top surfaces angled at 15 degrees, and go up in increments of 50 mm.